















Pyrite
2019 | FIRST Deep Space
We would like to present to you Team 696’s 2019 Robot Pyrite! Traveling at 16.26 ft/s while zooming across the field, our revolutionary variable height conveyor system delivers cargo with precision. With an integrated rolling intake and four NEO drive, Pyrite has a cycle time of only 7 seconds. The most striking aspect of the robot is our distinctive climber which is able to lift our 125 lb robot to a level three hab in under three seconds. With four modules producing 4000 in*lbs of torque and a 630 to 1 gear ratio, Pyrite’s stunning climber effortlessly lifts the robot onto the HAB with golden effectiveness.
Pyrite impressed judges and secured the Industrial Design award at the Los Angeles North and Las Vegas Regional Competitions.

Miss Calculation
2018 | FIRST Power Up
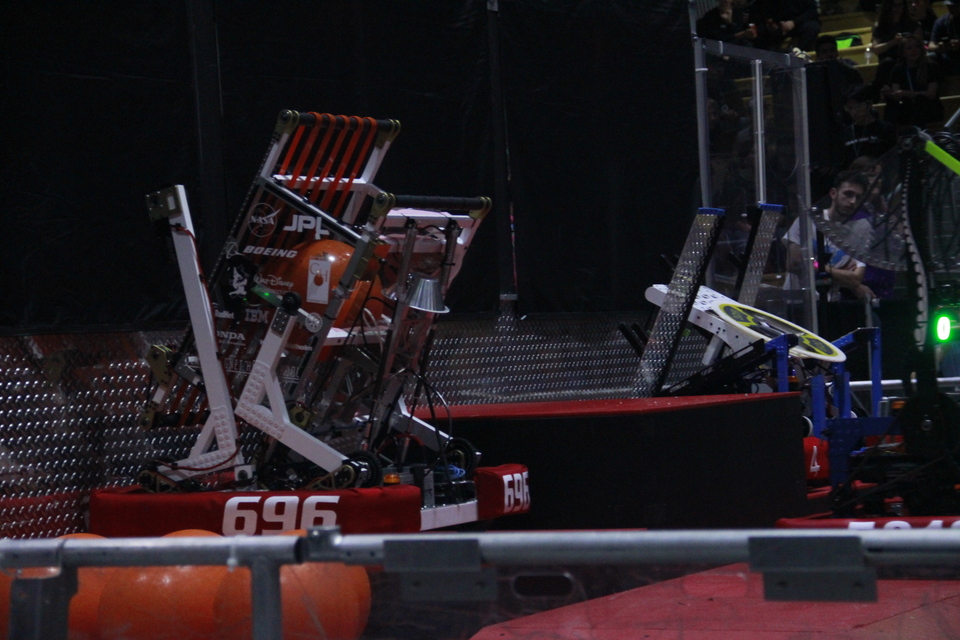
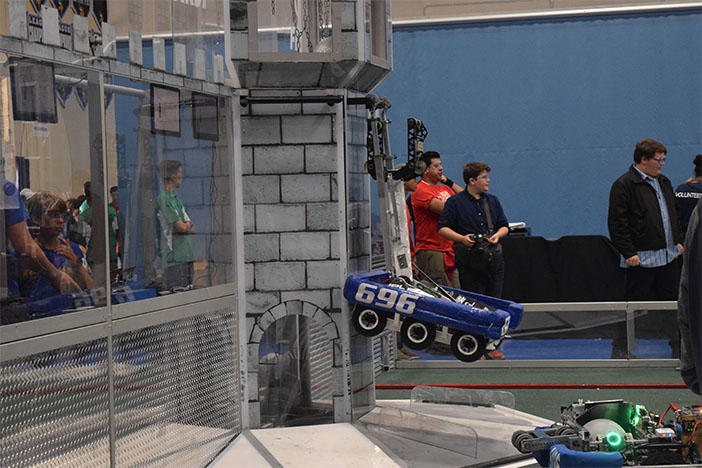
Meet Miss Calculation, Team 696's 2018 robot for the FIRST Power Up game. Travelling at 17.58 ft/s when traversing the field, this robot's pivoting elevator allows the robot to stay upright at high speeds. With a lightweight intake and mini-CIM drive, this robot is built to rapidly balance the scales. Simple mechanics go into the rigging systems of this robot, working to keep the numerous links of rope and chain that run the length of the robot working in perfect unison.
Miss Calculation participated in both the Los Angeles and Central Valley Regional competitions, reaching quarterfinals at both. At the Los Angeles Regional, we won the Industrial Design Award for our pivoting elevator and climber system.

Cascade
2017 | FIRST Steamworks
We present to you Team 696’s blue-banner winning robot: Cascade. Relying primarily on its consistency to score gears and quickly climb, Cascade was able to fight through qualification matches, coming out on top and eventually winning the 2017 Los Angeles Regional. The Houston Champs was no less challenging; however, Cascade was able to reach the Newton Division Finals.
Cascade, itself, measures at about 24 inches in height with a total weight of 120 pounds. Cascade was also given special mention for its exceptional quality at the Los Angeles Regional winning the Quality Award.
Banshee
2016 | FIRST Stronghold
Banshee was Team 696's robot for the 2016 game, FIRST Stronghold. Its arm is able to rotate from pickup to shoot in less than 0.5 seconds and with its 3‐stage telescoping arms, it easily scales the tower in under 4 seconds. Contained in the arm, there lies a precise and consistent shooter, making it capable for both high and low shots.
Centurion
2015 | Recycle Rush
Measuring in at 78 inches tall and weighing in at 120 pounds, Centurion is a student‐built robot made like no other. Unlike previous years in Team 696 history, this robot boasts a swerve drive‐train, allowing this robot to reach speeds of up to 12 feet per second in any direction. This feat is thanks to our custom‐made modular gearboxes on the base of Centurion.
Centurion can intake this year's game piece, an industrial‐sized tote, and stack it with the use of an elevator mechanism. It's also able to stack six totes, or five totes with a recycling bin on top.
Snapdragon
2014 | Aerial Assist
Snapdragon, our robot for the 2014 game Aerial Assist, had a height of 38 inches and a weight of 119.8 pounds. It had a high‐powered yoga ball shooter to propel the ball into goals over 6 feet in the air. Snapdragon could also intake balls from the ground and catch balls thrown towards it.
Ratchet
2013 | Ultimate Ascent
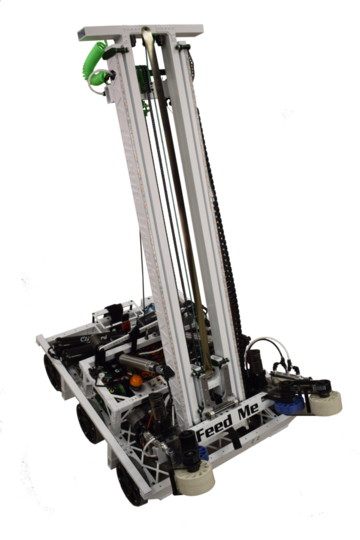
Measuring in at 29 inches tall (from the top of the hook) and weighing in at 114.6 pounds, Ratchet was Team 696's robot for the 2013 game, Ultimate Ascent. It had a high‐powered disc shooter as well as a simple pneumatic‐driven hook for a quick first level climb. The robot also had a choice between loading from the first level feeder station slot or picking discs of the field.

Queen Hannah's Revenge
2012 | Rebound Rumble
Clocking in at 50 inches tall, the 119.2 pound powerhouse named Queen Hannah's Revenge was Team 696's robot for the 2012 game, Rebound Rumble. It had a high‐powered shooter with an adjustable hood for aiming. Two deployable wedges were used to lower the bridge and to help the robot over the bump.

Reptar
2011 | Logo Motion
Reptar was our robot for the 2011 game, LOGO Motion. It had an extendable arm driven by one BaneBots RS‐775 motor and a gripper that used our patented orange belt technology that was also used on String Theory. The arm was able to place a game piece on any of the pegs, as well as pick them up off of the floor. Reptar had the largest number of motors of any of our past robots. (8 in total) It also used advanced sensor feedback to allow for pre‐programmed arm positions.

Shinbreaker
2010 | Breakaway
Shinbreaker, Team 696's robot for the 2010 game, Breakaway, was designed with a "bogey" wheel system. The system allowed our robot to easily move over the bumps that run across the field. It was the first time we used something other than Tank Drive to move our robot.The name of our robot is derived from the large metal "kicker" attached to the underside of the robot. The kicker should allow our team to perform well during the competitions.

String Theory
2009 | Lunacy
String Theory was our robot for the 2009 game, Lunacy. It was designed as an offensive 'bot, holding up to 30 balls ("moonrocks") at a time and able to deliver those balls into a trailer with great speed. It was able to pick up moonrocks from the floor or receive them from human players, then deliver them into the goal quickly.
One of the unique things about String Theory was its traction control system. Lunacy was played on an extremely low‐friction surface, making good traction control essential to game play. We decided on a programming‐controlled mechanical solution to the design challenge. In low traction situations, the driver would pull a trigger which would make the wheels accelerate slowly from stop to full power.

JawZ
2008 | FIRST Overdrive
JawZ was a transition robot for our team. At the end of the 2007 season, more than half of our experienced members graduated, and four of our mentors had to leave for various reasons. With a team of only 14 members, seven of whom were rookies, the team pulled together against extreme adversity to create JawZ. With a telescoping tower and a huge gripper—the "Jawz"—it was a symbol of our team's determination to get a functioning robot on the floor no matter what stood in our way.

The Burd
2007 | Rack n' Roll
The Burd was our robot for the 2007 game, Rack n' Roll. It had an arm driven by one window motor and a pneumatically activated gripper that could score up to eight ringers per match. Its signature weapon was its "wings," which were pneumatically raised platforms that could life other robots to earn up to 60 points a match. This feature won the Delphi "Driving Tomorrow's Technology" Award at the Los Angeles Regional. The Burd's sturdy design and adaptability to the game allowed us to get Finalist at the Los Angeles Regional, and get first place at the San Diego Regional. For the 2007 season, it was the first time in our team's history, we were able to attend the international championships in Atlanta!

Robot Man Jan
2006 | Aim High
Our robot for the 2006 game, Aim High, was called Robot Man Jan. It featured a basket for the human‐loading of balls, a two speed drive train, a gravity‐feed for balls and a shooter. The shooter had two vertically‐oriented wheels to shoot balls into either the high or low goals. It had the ability to tilt up/down, or rotate 180 degrees. It was able to score in the high goal by using its camera to search out the green light, and autonomously orient the shooter to score balls accurately. For the integrated shooter and camera system, this robot won the Radio Shack Innovation in Control Award.
GLAGH (Armstrong)
2005 | Triple Play
GLAGH, also known as Armstrong, was the robot we created for the game, Triple Play. In that game, we had to lift PVC tetrahedrons and lift them onto larger tetrahedrons in order to score. Our robot had a two‐segment, double‐jointed arm used for manipulating game pieces, and a powerful drive train with custom designed two‐speed, shifting transmissions. GLAGH performed well at the Los Angeles Regional. At the end of the Friday qualification rounds, Team 696 was ranked 1st. However, our losses during the Saturday qualification rounds, GLAGH ended up seeding 14th out of the 52 teams that attended. GLAGH was picked to be a part of an alliance for elimination rounds, and made it to quarterfinals.

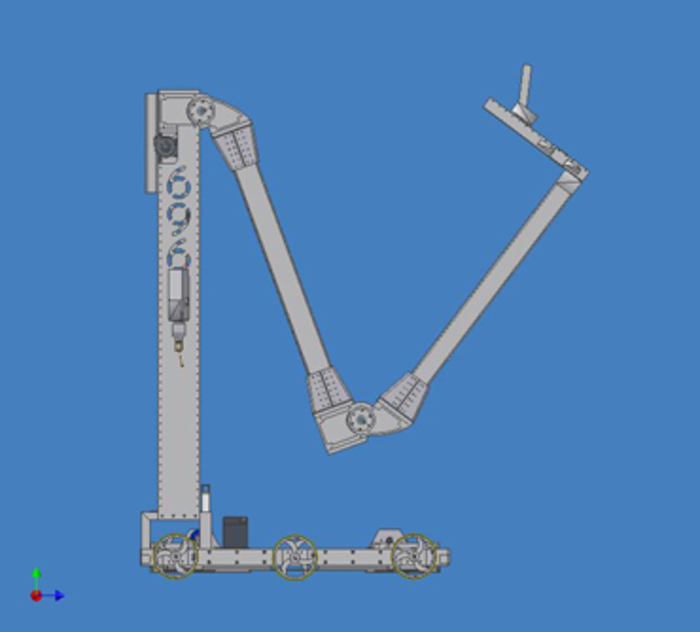
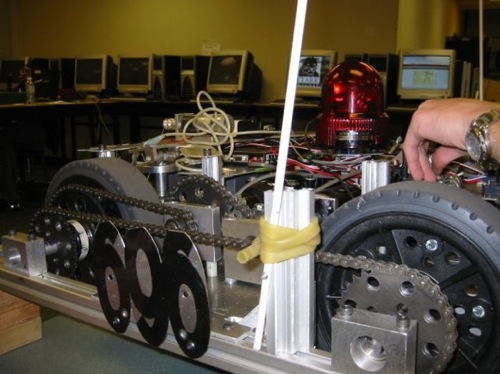
R.J.
2004 | FIRST Frenzy: Raising the Bar
In 2004, our robot, unofficially named R.J., played the game Raising the Bar. It was the team's first robot to use pneumatics and the van door motor, our first robot with a welded chassis, and our first robot with an actual gearbox. It featured a unique swiveling hook on the top of its tower, which allowed it to hang from the ten‐foot bar on the field successfully, giving it an effective advantage over other robots playing the game.
The robot was able to use its different mechanisms for various purposes, some even not intended in the design. The extending tower was discovered to be able to "uncap" the goals (lift the large yellow balls from the top of the goals), which proved useful during some matches. Though the robot was hard to steer due to its pneumatic tires, it was still a formidable force in game play, making it to the quarterfinals at the Los Angeles Regional and taking second place at the Phoenix Regional.
Heather
2003 | Stack Attack
Heather, one of our most storied robots, played the 2003 game, Stack Attack. On the field, Heather became known for her ability to tip over opposing robots and her habit of exploding the plastic game pieces, sending blue or red shards flying across the field. She was powerful and quick on the field, and could win any pushing match due to her large wheels. She was a valued alliance partner because she could clear the opponents' game pieces from their side of the field before the end of the match. Heather ended up placing 3rd at the Phoenix Regional taking Semifinalist, and taking Finalist at the Los Angeles Regional.
Viper
2002 | Zone Zeal
During the 2002 season, Viper was Team 696's robot for the game, Zone Zeal. It weighed a total of 130 pounds and was 20 inches tall. After having much success in the 2001 season, we anticipated the same in the 2002 season. Although we did have a foundation to build upon, new and exciting challenges presented themselves. With mostly rookie members on the roster, we took the challenges head on.

Clark Kent
2001 | Diabolical Dynamics
Clark Kent was Team 696's inaugural robot, which played the 2001 game, Diabolical Dynamics. It placed 14th out of the 47 teams at the 2001 Los Angeles Regional, and ended up taking third place in the elimination rounds.